






L'aereo che plana come un uccello
Alcuni ricercatori del MIT hanno sviluppato un sistema che consente a un aliante di atterrare su un cavo elettrico.
[ZEUS News - www.zeusnews.it - 21-07-2010]
Chiunque, vedendo atterrare un aereo, immagina a quali difficoltà esso è sottoposto. La velocità, l'altezza dal suolo, l'impatto con la pista, sono solo alcuni dei parametri critici di un aereo in fase di atterraggio.
Tuttavia, chiunque di noi abbia visto un uccello che plana, resta sbalordito dalla grazia e dalla perfezione che la natura ha saputo mettere in campo.
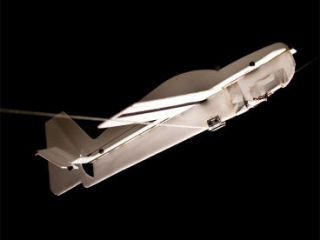
Qualcuno al M.I.T. si è chiesto come mai lo stesso approccio degli uccelli non fosse utilizzato dagli aerei. Il risultato è stato una sperimentazione che ha condotto alla costruzione di un velivolo ultraleggero capace di planare e posarsi come un uccello su un cavo, come quelli utilizzati per il trasporto e la distribuzione della corrente elettrica.
Per progettare il loro sistema di controllo, il professore Associato Russ Tedrake, membro del gruppo di Intelligenza Artificiale del MIT, e Rick Cory, uno studente del dottorato di ricerca, hanno messo a punto, durante un lavoro di tesi, un modello matematico di un aliante in stallo.
Così Cory e Tedrake hanno potuto osservare il fenomeno dello stallo, confrontando i dati teorici con ciò che avviene nella realtà, approntando quindi una serie di controlli di correzione degli errori valutati.
Applicando tecniche innovative sviluppate presso il laboratorio del MIT per campi come l'Information and Decision System, i due sono stati in grado di calcolare con precisione quali e quante deviazione apportare affinché ci si possa avvicinare al modello teorico.
Lo studio condotto ha attratto l'interesse della US Air Force, in maniera specifica sulla possibilità di costruire veicoli aerei senza equipaggio, con la capacità di atterrare in spazi ridotti.
"Quello che Russ, Rick e il loro team stanno studiando è unico", spiega Gregorio Reich dell'Air Force Research Laboratory. Reich ricorda, tuttavia, che nei loro esperimenti, Cory e Tedrake hanno utilizzato i dati di telecamere poste a parete per misurare la posizione del velivolo, e che gli algoritmi di controllo per la correzione del volo sono eseguiti su un computer a terra, che trasmetteva a un controllore le modifiche da apportare.
Reich continua: "La potenza di calcolo che si può avere a bordo di un veicolo di queste dimensioni invece è molto limitata". Questo studio applicato al campo dei droni spia potrà in futuro ampliarne le potenzialità in quanto a flessibilità è manovrabilità in ambiti e missioni particolarmente delicate.
Anche se a oggi non è ancora possibile un'implementazione in maniera automatica, la strada intrapresa dai ricercatori del MIT sembra promettente. Nel filmato qui sotto una dimostrazione.
|
Se questo articolo ti è piaciuto e vuoi rimanere sempre informato con Zeus News
ti consigliamo di iscriverti alla Newsletter gratuita.
Inoltre puoi consigliare l'articolo utilizzando uno dei pulsanti qui
sotto, inserire un commento
(anche anonimo)
o segnalare un refuso.
© RIPRODUZIONE RISERVATA |
|
|

Commenti all'articolo (3)
22-7-2010 02:04

21-7-2010 22:33

|
|
||






|


















- Al caffe' dell'Olimpo:
[GIOCO] Associazioni di idee - Sopravvivere alla new economy:
Altra occasione persa per essere uno stato
normale. - Motori di ricerca:
I motori di ricerca & la privacy - Tablet e smartphone:
Utilizzo smartphone - Internet - generale:
Come interagite con la IA? - Aiuto per i forum / La Posta di Zeus / Regolamento:
Avvisi risposte e notifiche MP non mi arrivano - Altra ferraglia stand-alone:
Android TV e smart TV - Sicurezza:
Abbonamento ad antivirus con prova gratuita - Programmazione:
Evoluzione di carriera: da Sviluppatore IBM i a
PM/Tech Lead - Windows 11, 10:
Comparsa di un Disco Locale sconosciuto

dagda